EN
EN SK
SK IT
IT RU
RU CN
CN EN
EN
Der Inhalt des folgenden Artikels beschäftigt sich mit dem Vergleich der Funktionsweisen und der Erklärung der technischen Unterschiede zwischen den Untersetzungsgetrieben TwinSpin® und dem auf dem Prinzip von Strain Wave basierenden Getrieben. In der Praxis begegnen uns Fälle, in denen Anwender die hochpräzisen Untersetzungsgetriebe TwinSpin® und deren Funktionsprinzip mit der Funktionsweise der Untersetzungsgetriebe Strain Wave vergleichen. Das kann sich negativ auf das Design der Anlage bzw. auf die Anbindung Untersetzungsgetriebe zum Servomotor auswirken. Den Vergleich beider Getriebe beginnen wir mit den Unterschieden im Aufbau des Untersetzungsgetriebes.
Untersetzungsgetriebe auf dem Prinzip von TwinSpin®
Abbildung 1 zeigt das Konstruktionsprinzip TwinSpin®: die Exzenterwelle liegt zentrisch, die Zykloidscheiben und Kreuze dienen als Transformationselemente, welche das Drehmoment übertragen. Der komplette Getriebemechanismus ist im Gehäuse gekapselt.
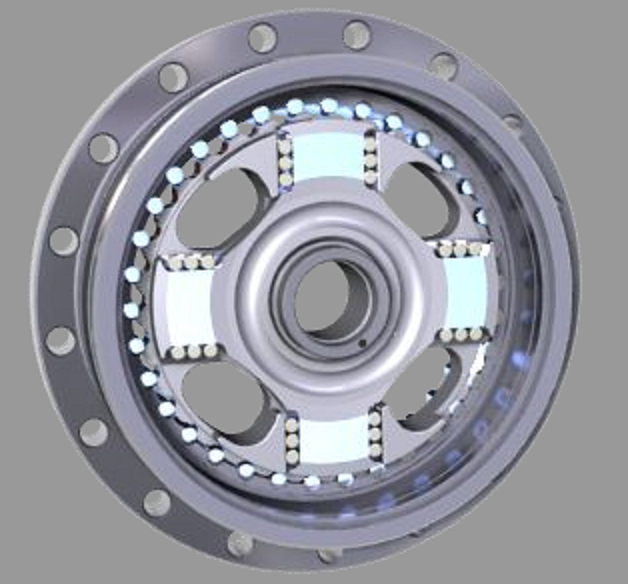
Abb. Nr. 1
Untersetzungsgetriebe auf dem Prinzip von Strain Wave
Die Abbildung 2 zeigt das Prinzip „Strain Wave“; auf der Eingangsseite ist ein elliptisches Element - Wellengenerator (Wave Generator), dann folgt ein verformbares Element (Flexspline), welches die Form des Wellengenerators annimmt und einen Ring (Circular Spline), in den das flexible Bauteil hineingedrückt wird.
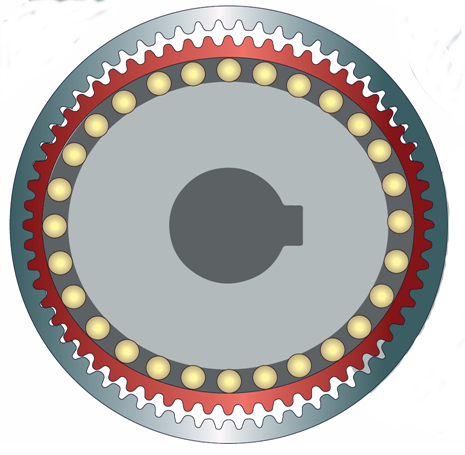
Abb. Nr. 2
Wie auf den gezeigten Abbildungen zu sehen ist, nutzen die Untersetzungsgetriebe TwinSpin® des Herstellers SPINEA® für die Reduktion der Drehzahlen und die Kraftübertragung ausschließlich starre Bauteile. Diese Komponenten realisieren hohe Verdreh-Steifigkeiten und beinhalten kein verformbares Element (Flexspline). Unter diesen Gesichtspunkten liegt dieses Prinzip nahe bei den Zykloidgetrieben (Cycloidal Drive). Die Untersetzungsgetriebe Strain Wave sind besonders in kleinen Größen und Momenten weit verbreitet. Produkte auf Basis der Konstruktion TwinSpin® bringen die Vorteile des Zykloidprinzips auch in kleinere Anwendungsgrößen. Die kleinsten Untersetzungsgetriebe TwinSpin® sind ab einem Durchmesser von 50 mm verfügbar.
Ein weiterer Unterschied zwischen dem Prinzip TwinSpin® und Strain Wave ist der Wert der Untersetzungsverhältnisse. Bei Strain Wave ist das Verhältnis gerade, beim TwinSpin® - Prinzip ist die Untersetzung ungerade. Bei der Entwicklung und Konstruktion von mechatronischen Systemen mit Untersetzungsgetrieben TwinSpin® ist es notwendig, auch weitere Unterschiede zu berücksichtigen:
Drehmoment, das bei den hochpräzisen Untersetzungsgetrieben TwinSpin® nicht von der Untersetzung abhängt. Das bedeutet, dass ein Getriebe mit der Untersetzung 33 das gleiche nominale Drehmoment bietet wie ein Getriebe mit der Untersetzung 85. Beim Prinzip der Strain Wave-Getriebe hängt das Nenndrehmoment von der Untersetzung ab, es kann bei einer Untersetzung 30 um die Hälfte kleiner sein als bei der Untersetzung 80 oder 100.
Größe des Untersetzungsgetriebes – die auf dem Prinzip des Zykloidgetriebes basierten TwinSpin® Antriebe ermöglichen hohe Drehmomente bei kleineren Durchmessern und verfügen somit also über eine höhere Drehmomentdichte als beim Prinzip Strain Wave. Mit ähnlicher Größe erreichen die Untersetzungsgetriebe TwinSpin® höhere Drehmomente und höhere Torsionssteifigkeiten.
Antriebsträgheit - der Wellengenerator des Untersetzungsgetriebes Strain Wave hat einen relativ großen Durchmesser, was eine hohe Antriebsträgheit verursacht. Die Untersetzungsgetriebe TwinSpin® haben bei gleichen Nenndrehmoment eine viel niedrigere Antriebsträgheit. Die Trägheit des Antriebs ist signifikant für die Dynamik.
Bei den hochpräzisen Untersetzungsgetrieben TwinSpin® gibt es keine Verformung (das Phänomen Ratcheting und Buckling) wie bei den Untersetzungsgetrieben Strain Wave. Das bedeutet, dass selbst eine sehr hohe Überlastung zu keinen Schleppfehlern in der Position oder keiner Verformung der Bauteile des Untersetzungsgetriebes führt. Die Getriebe TwinSpin® ermöglichen eine 5-fache Überlastung des Untersetzungsgetriebes ohne Funktionsverlust oder Beschädigung der inneren Komponenten. Durch die robuste Hauptlagerung im Getriebe von TwinSpin® wird eine weitere Lagerung an der Anwendung unnötig. Die Funktion wird durch Überlastung und Kippmomente nicht beeinflusst. Bei den Untersetzungsgetrieben Strain Wave kann die Überschreitung der Höchstwerte des Kippmoments eine Funktionsstörung bewirken.
Einheit – die hochpräzisen Untersetzungsgetriebe TwinSpin® sind ausschließlich als Einheiten mit integriertem axialem/radialem Abtrieb-Lager verfügbar.
Die Schmierung ist ein wesentlicher Aspekt bei der Funktionsweise der Untersetzungsgetriebe TwinSpin®. Die Antriebe sind mit den unterschiedlichsten Schmierstoffarten verfügbar.
Zum Schluss ist es wichtig zu ergänzen, dass jede Anwendung ihre eigenen Besonderheiten hat. Daher ist erforderlich, dass der Kunde alle Aspekte und Anforderungen an die Antriebsparameter abwägt. Die Spezialisten von SPINEA werden Sie über die richtige Dimensionierung von Anlagen mit hochpräzisen Untersetzungsgetrieben der Marke TwinSpin® gerne weiter informieren.