EN
EN SK
SK IT
IT RU
RU CN
CN EN
EN
Die dampf- und wasserkraftbetriebenen Maschinen der ersten Phase der industriellen Revolution vereinfachten die manuelle Arbeit zunächst in den Produktionshallen und begannen dann, außerhalb der Hallen Fuß zu fassen. Sie drangen in den Verkehr, die Landwirtschaft, die Luft, das Meer, den Untergrund und die Bergwerke ein.
Die vierte Stufe der industriellen Revolution ist durch eine analoge Entwicklung bei den Robotern gekennzeichnet. Sie beginnen, außerhalb der Hallen eingesetzt zu werden. Sie passen sich an die neuen Anforderungen der Außenumgebung, der technischen Parameter und der vereinfachten Wartung an. Viele Komponenten, die in Robotern für den Innenbereich integriert waren, sind für den Außenbereich nicht geeignet. Wir stehen am Anfang der Entwicklung neuer spezialisierter Komponenten für die Außenrobotik. Die Anforderungen liegen in einem breiten Temperaturbereich von extrem niedrigen - 40 °C bis zu hohen +50 °C. Auch für ein breites Spektrum von Außenumgebungen: Luftdruck- und Strömungsschwankungen, Feuchtigkeitsschwankungen, Wasser, Staub, Schlamm, Sand. Widerstandsfähigere Komponenten sind für eine rauere Handhabung mit der Möglichkeit von Kollisionen geschaffen. Auch die Anforderungen an eine leichtere Wartung sind mit einfachen, außerhalb von Industriegebieten verfügbaren Geräten realisierbar.
Bei der Entwicklung von Robotern für den Außenbereich werden Objektkollisionen in unbekannten Umgebungen berücksichtigt. Roboter für Außenbereiche müssen kollisionssicher sein. In Hallen sind Kollisionen sehr selten, da die Umgebung recht klar definiert werden kann. In Außenbereichen sind Kollisionen ein wahrscheinlicher Bestandteil des Betriebs und nicht vorhersehbar. Daher ist die Integration von Kollisionssituationen Teil der technischen Anforderungen.
Roboter, die sich im Freien aufhalten, führen Energie mit sich. Alternativ sollten sie in der Lage sein, Energie aus extern verfügbaren Quellen aufzuladen.
Jede noch so kleine Gewichtsreduzierung eröffnet Möglichkeiten zur Erhöhung von Geschwindigkeit, Tragfähigkeit, Reichweite und Effizienz. Die Komponenten werden anhand untypischer technischer Parameter wie Drehmomentdichte (Verhältnis von Drehmoment zu Masse), Leistungsdichte (Verhältnis von Leistung zu Masse) und Raumdichte (Verhältnis von Volumen zu Masse) bewertet.
Kollisionen und die Forderung nach geringem Gewicht sind zwei typische Merkmale von Robotern für den Außenbereich. Sie sind auch wesentliche Merkmale von TwinSpin® kompakten Zykloidengetrieben oder DriveSpin® kompakten Antrieben von SPINEA®. Die Kollisionssicherheit wird durch den Parameter "Notmoment" charakterisiert. Dieser Parameter der TwinSpin®-Getriebe weist beim Vergleich von Getrieben mit gleichem Nennmoment die besten Werte unter den Wettbewerbsprodukten auf. Der Grund für diesen hohen Wert ist die maximale Anzahl von Rollen direkt im Getriebe am Umfang des Eingriffskreises des Getriebes. Die Drehmoment- bzw. Volumendichte des Getriebes wird in der beigefügten Abbildung visualisiert, die das Gewicht und die Abmessungen des harmonischen Prinzips mit dem kleinsten Zykloidengetriebe der Welt, dem TwinSpin® TS50 von SPINEA® vergleicht. Ausgangspunkt bzw. Vergleichsparameter ist das Nenndrehmoment der beiden Prinzipien.
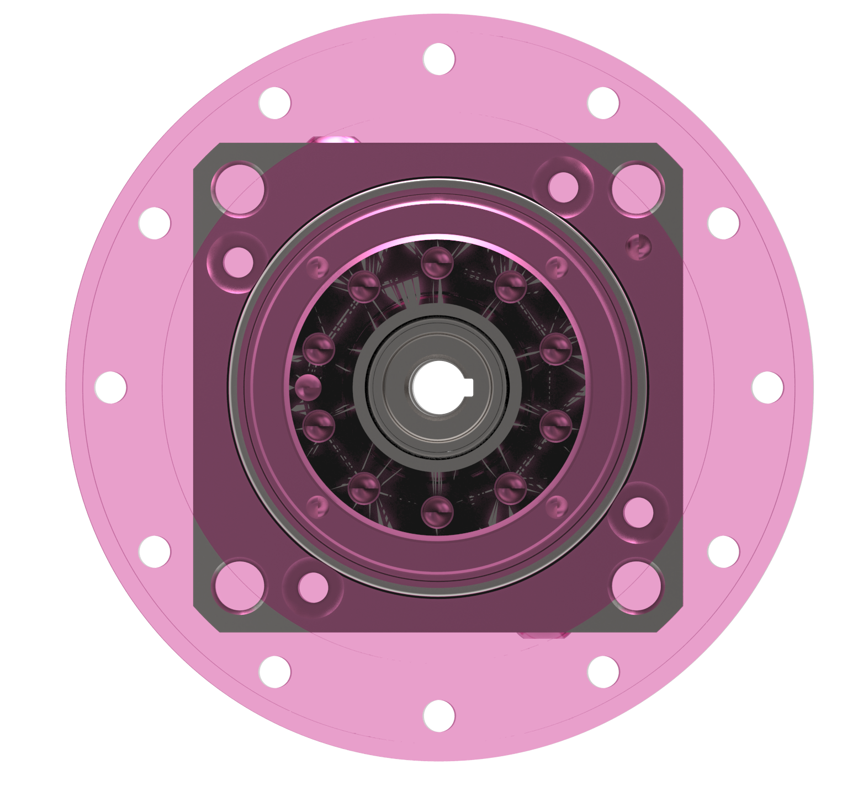
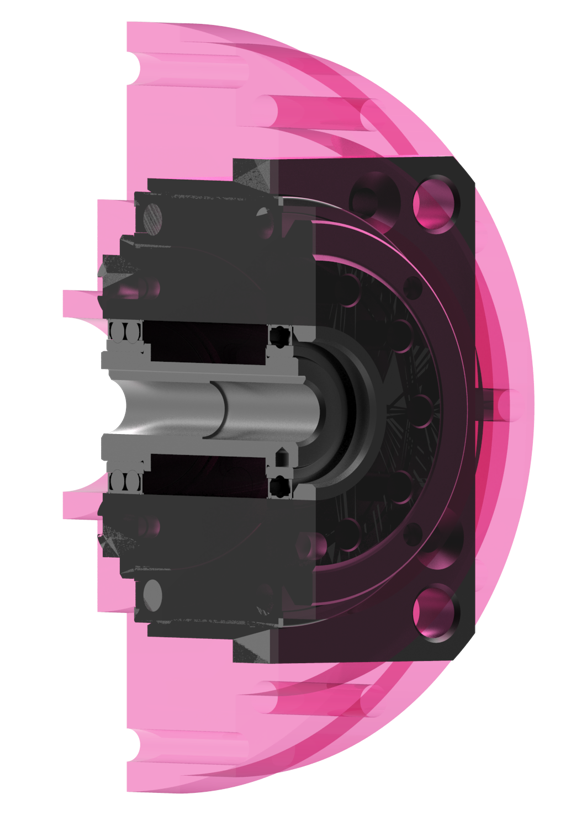
Abbildung - Größenvergleich Harmonic-Prinzip versus SPINEA TS 50 - Volumendichte
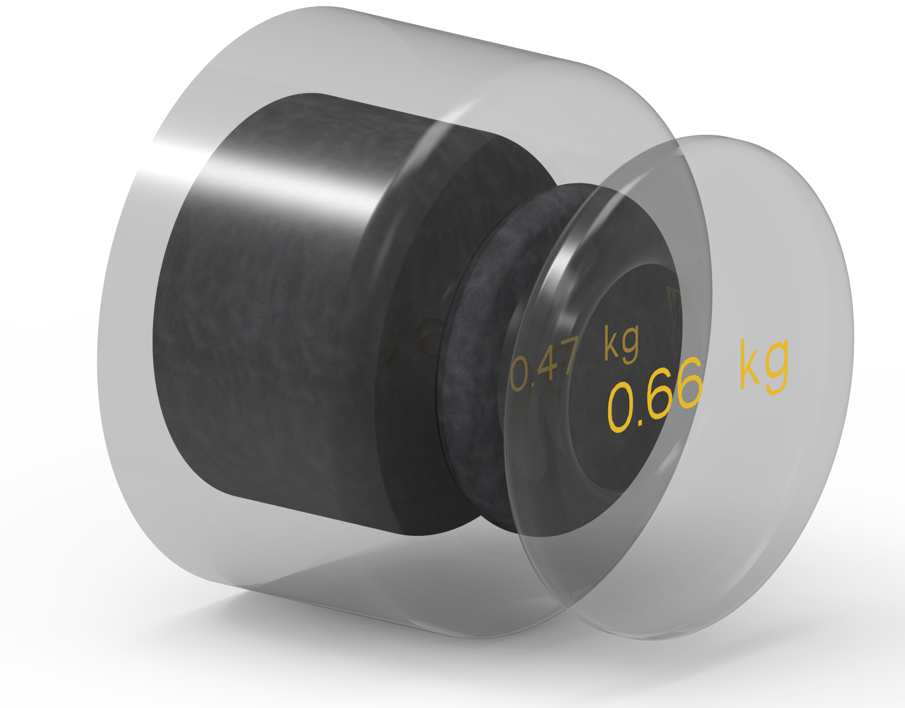
Abbildung - Massevergleich zwischen dem Harmonic Prinzip und der SPINEA TS 50 - Momentendichte
Für Außenanwendungen können spezielle Getriebe auch für den Betrieb bei niedrigen Temperaturen mit einem für diese Temperaturen geeigneten Schmierstoff vorbereitet werden. Es ist möglich, die internen Einstellungen des Getriebes weiter zu optimieren und Reibungswiderstände auf ein Minimum zu reduzieren. Es ist auch möglich, Dichtungssysteme für verschiedene Umgebungen anzubieten.
Wir bieten die Möglichkeit, eine kompakte Verbindung mit Maxon-Motoren oder anderen Herstellern, die sich mit der Entwicklung von Motoren für den Außenbereich beschäftigen, herzustellen.
Roboter für den Außenbereich bieten eine große Chance für die Entwicklung in den Bereichen autonomes Fahren, künstliche Intelligenz, Orientierung im Raum und Bewegung in schwierigen Umgebungen. Die Getriebe von SPINEA® werden Teil dieses Prozesses und des Fortschritts sein.
Gerne arbeiten wir bei solchen Projekten auch mit Entwicklungszentren und Universitäten zusammen, die an solchen Robotiklösungen arbeiten. Wir haben einschlägige Erfahrung in der Industrierobotik und auch in Anwendungen für andere anspruchsvolle Branchen.