

 SK
SK DE
DE IT
IT RU
RU CN
CN
Friction is a mechanical phenomenon that is always present at a contact of mechanical bodies or mechanical environments. Mechanical friction in position servo control represents the relevant and serious undesired nonlinear physical property.
Talking about friction we have to separate two kinds of friction: Coulomb friction, independent on speed, and Viscous friction as a resistance to the body motion. The higher is the speed, the higher is the viscous friction, and, higher is the viscosity of the environment in which the body moves, the higher is the viscous friction.
For simplicity reasons:
Starting torque indicated or measured on the input shaft is a Coulomb torque coming from all internal Coulomb friction sources. Starting torque is the overall Coulomb friction reduced to the input shaft.
Viscous friction torque indicated on the input shaft during its rotation is a viscous torque coming from all internal viscous friction sources inside the reduction gear. Also as before, we always calculate with the overall viscous friction reduced to the input shaft.
Picture 1: Simplified physical gear model
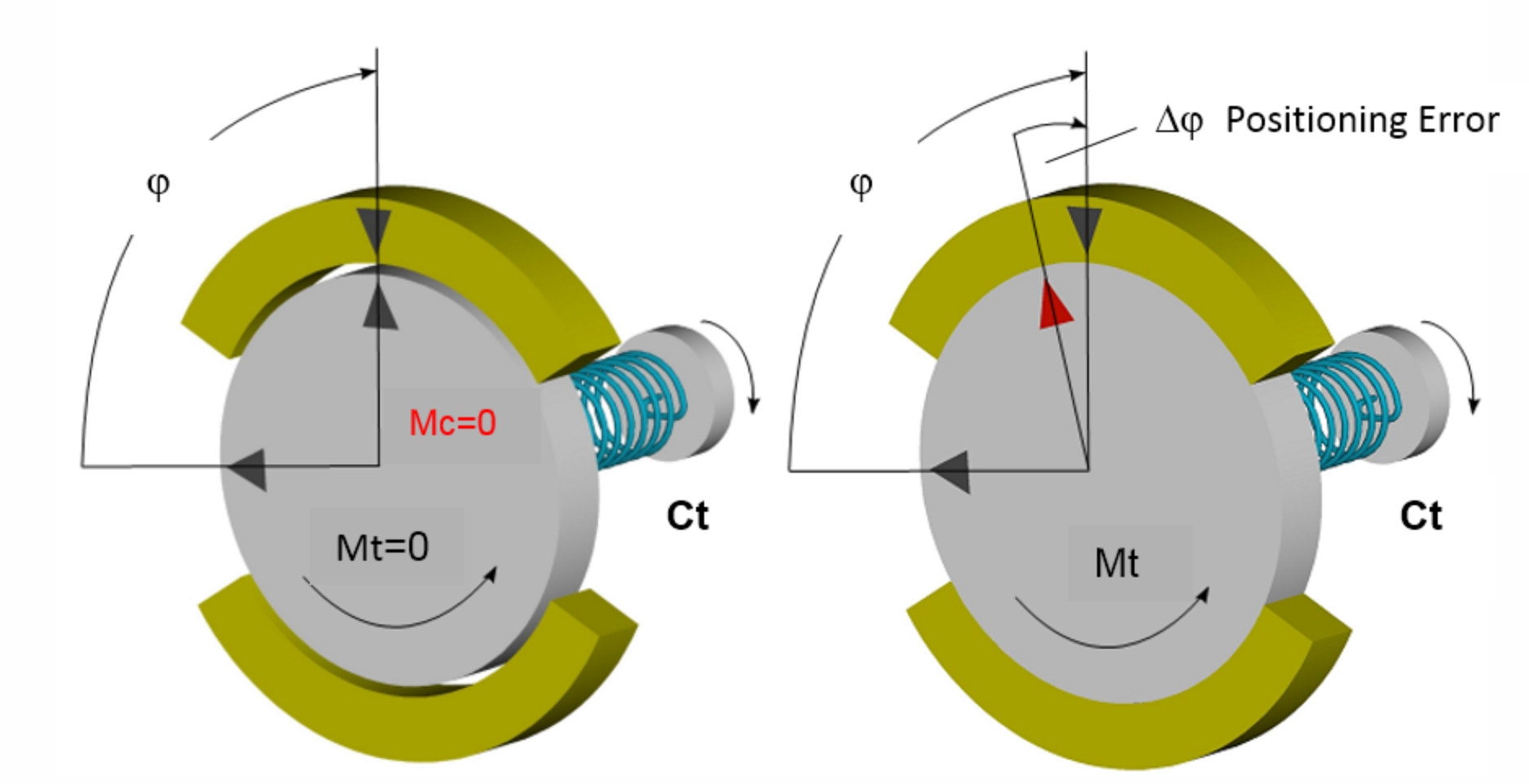
The simplified physical model above describes the correlation between torsional rigidity, internal friction, and the ability of the gear to achieve desired positioning precision. The disk represents the object to be positioned with respect to arcuate jaws. The disk is positioned with the spring, its torsional rigidity Ct represents torsional rigidity of reduction gear. Mc is total internal Coulomb friction of reduction gear reduced to the output of the gear.
In the model above the Mc is represented by friction torque Mt generated by the friction between arcuate jaws and the positioned member.
During precision positioning, the task is to rotate the disk by the angle from the initial position by the means of torsional spring in such a way that the mark on the disc is the exact opposite of the mark on the arc jaw. If there is no touch of arc jaw and disc, then no friction torque is generated and the task is easily done. However, as soon as we clinch the disc with jaws, friction torque Mt appears and then the task of precise positioning is becoming much more difficult if not impossible at all.
The positioning error can be therefore defined as Δϕ =Mt/Ct.
Angular Hysteresis loss H of reduction gear equals 2Δϕ, that is H= 2Δϕ. This is, however, the smallest error in positioning, if we add the change in friction with changing speed and viscous friction the positioning error would be much bigger.
For precision application, the requirement is to have friction as low as possible and there we aim with G series reducers.
TwinSpin® G series advantages
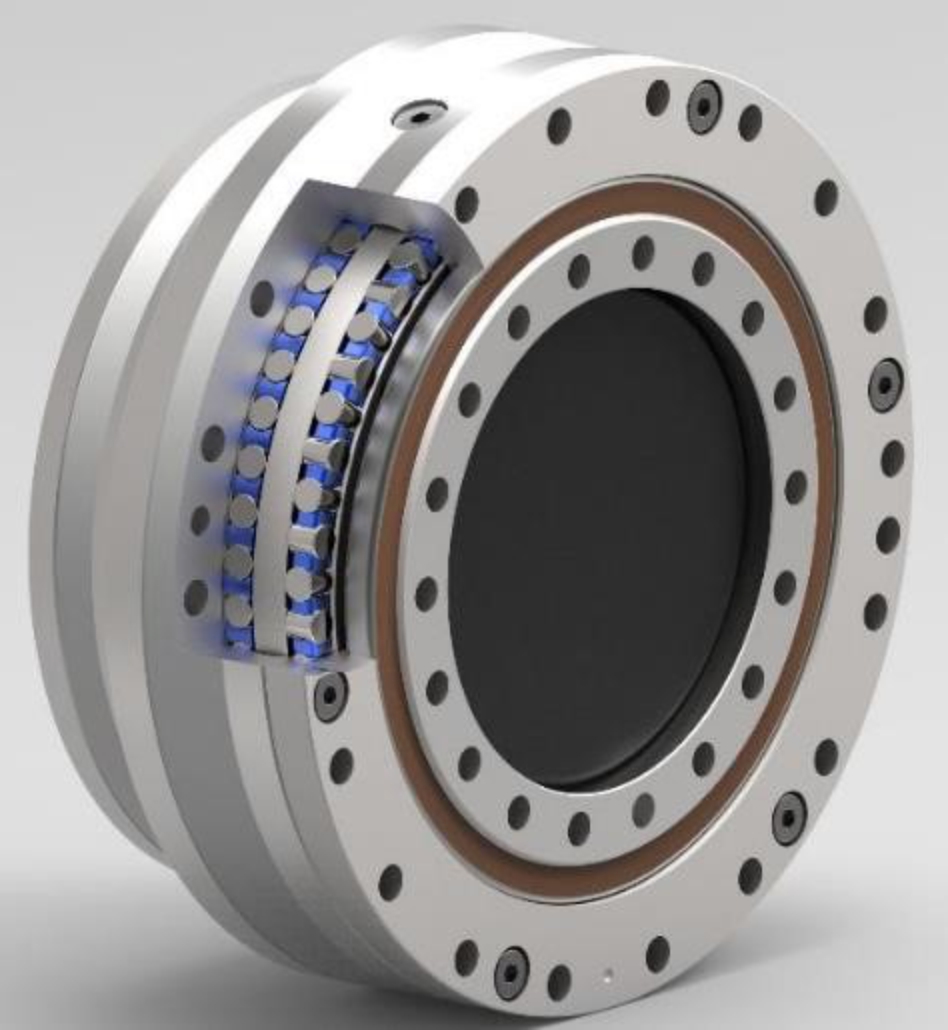
The main difference between TwinSpin® T, E, and H series and the TwinSpin® G series design is the novel main bearing design. The key technical feature lies in the separation of the main bearing from the reduction mechanism.
From this come the following benefits:
|
Friction under control Lower hysteresis The low setting of Lost motion for small reducers under 100 mm
Extremely low runouts on the main bearing Highest tilting stiffness in given reducer size |
Picture 2: G Series reducer main bearing
Lost motion
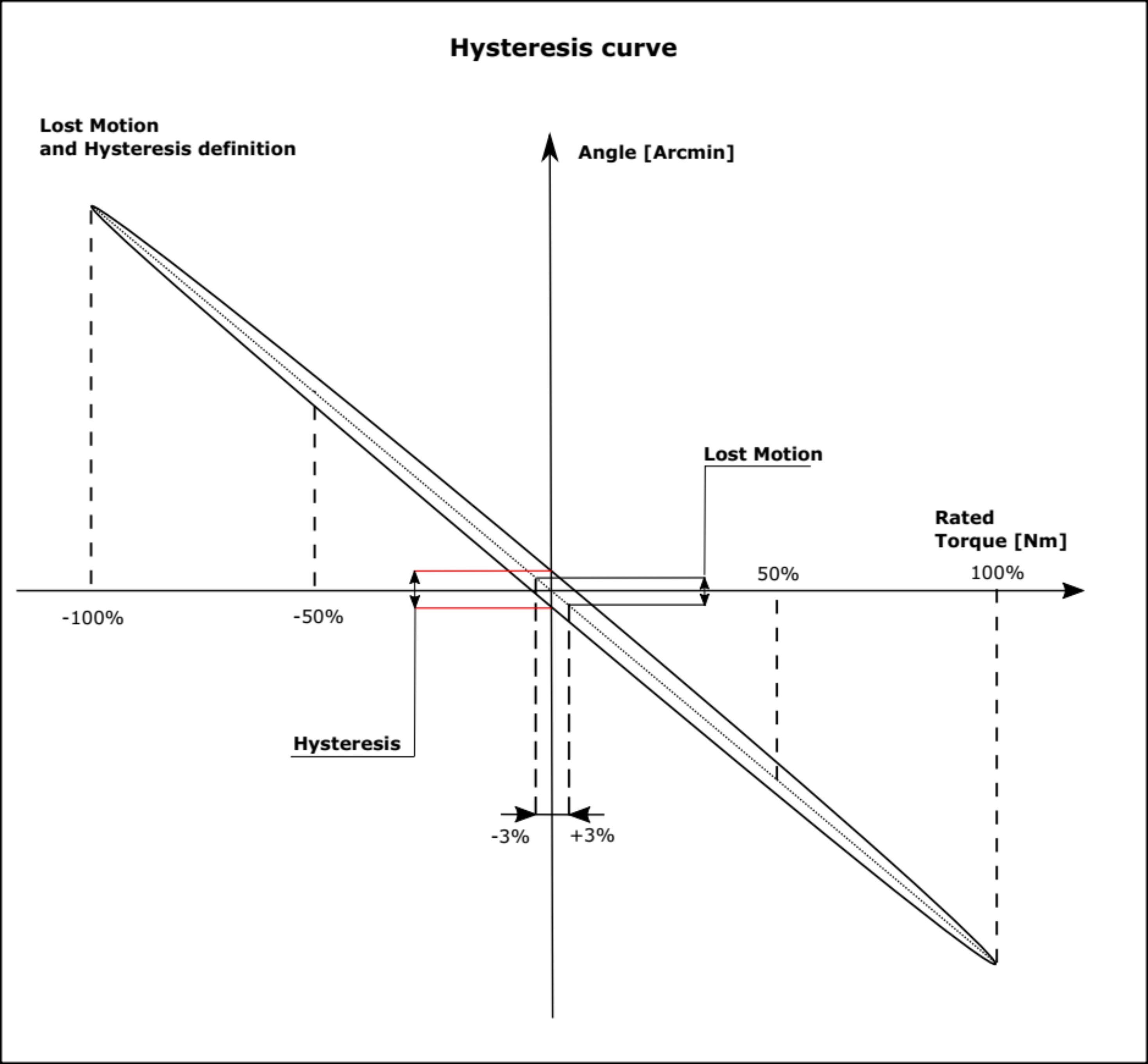
In the preceding generation of small gears in range, 60-100 mm of outer diameter the upper value of Lost Motion setup was up to 1,5 Arcmin due to the design constraints. The aim for the G series was to achieve Lost motion in small reducers well below 1 Arcmin and at the same time to keep internal friction inside the gear much lower than before which is usually a contradictory task.
Hysteresis
Hysteresis in general is an undesirable phenomenon in precision position control. With the G series of precision gears, we strived to dramatically reduce Hysteresis as one of the main characteristics influencing positioning uncertainty. Small size-reduction gears are very friction sensitive, in spite of that, our target was to keep Hysteresis value below 1 Arcmin. As the friction directly influences hysteresis, by keeping the friction under control and as low as possible we implicitly keep hysteresis at the lowest possible values.
Picture 3: Lost motion and Hysteresis definition
No-load starting torque
The no-load starting torque is a quasi-static torque required to start rotation of the input shaft if no load is applied to the output. G series reducers show a reduction in No-load starting torque by 30-40% in comparison with older T and E series reducers of similar size and ratio.
Tilting stiffness
Tilting stiffness - could be expressed as a property of output bearing to resist tilting moment applied on the output flange. Simply we can say, it is a magnitude of tilting moment that will cause angle deflection of 1 Arcmin on the output flange. TwinSpin® G reducers have integrated radial-axial bearing which is able to support tilting moment, radial and axial forces. In high precision applications, for example, medical, optical, machine tool applications are essential to support the driven system by an extra-rigid and precise radial-axial bearing which is integrated directly into the reduction gear. With the G series, we introduced a new design of the main bearing with an increase in tilting stiffness of more than 50% in comparison with the older T, E, and H series.
Picture 4: Tilting stiffness measurement – size TS185 G
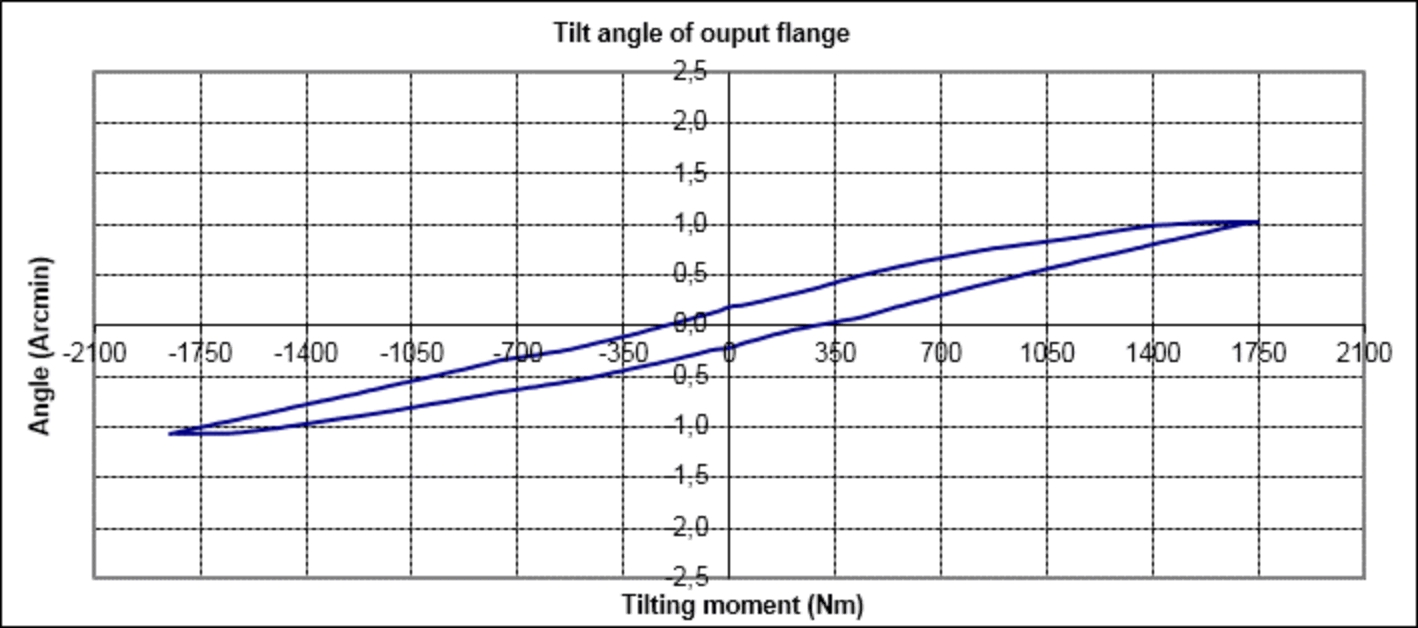
Measured stiffness Mtave = 1 399,32 Nm/Arcmin
Robust and rigid main bearing further provides stable and precise support for transmission mechanism and even in case the gear is heavily overloaded with tilting moment, internal transmission components are not affected nor damaged and reducer keeps the precision characteristics.
On-demand high precision main bearing
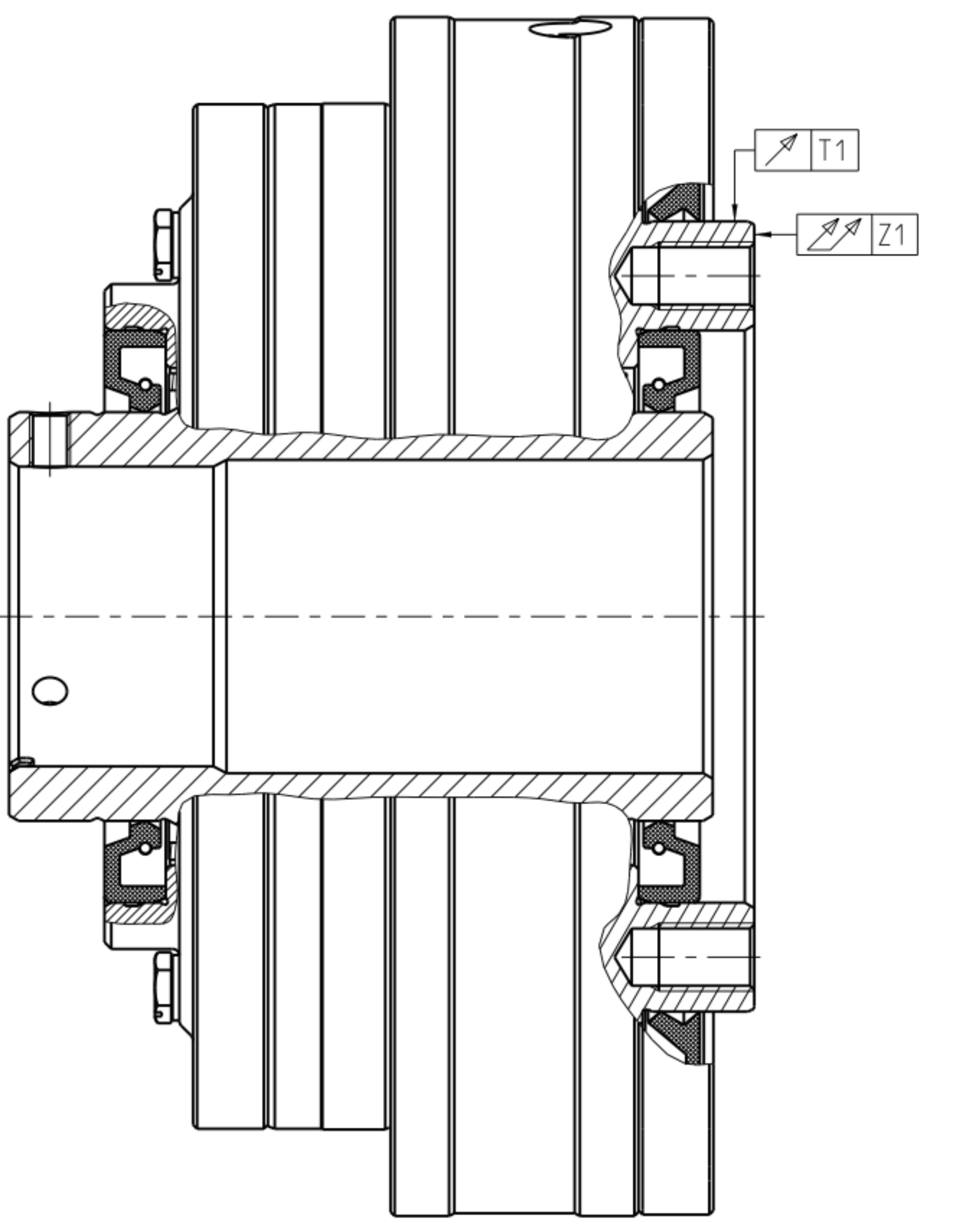
The new concept of main bearing similar to YRT bearing brings further benefits in the high precision of output bearing. Typical values of radial and axial runout of the main bearing as indicated by parameters T1 and Z1 on the picture below are around 5-7 micrometers. For special requests, reducers can be made with even smaller runouts up to 3 micrometers.
Picture 5: Runout parameters of the main bearing
Gear overload
TwinSpin® G series can be heavily overloaded without the risk that any part of the reducer will be dismembered from the reducer itself. Even if the risk of overload higher than 10x of Rated Torque or Rated Bending Moment, G series reducer will not disintegrate, even under such a heavy condition. This is important in applications where a very high safety factor is required, for example, medical devices.
Positioning accuracy and repeatability
With some simplification we can say that positioning accuracy is the ability to reach the correct position and repeatability is to reach the correct position every time when the same movement is performed.
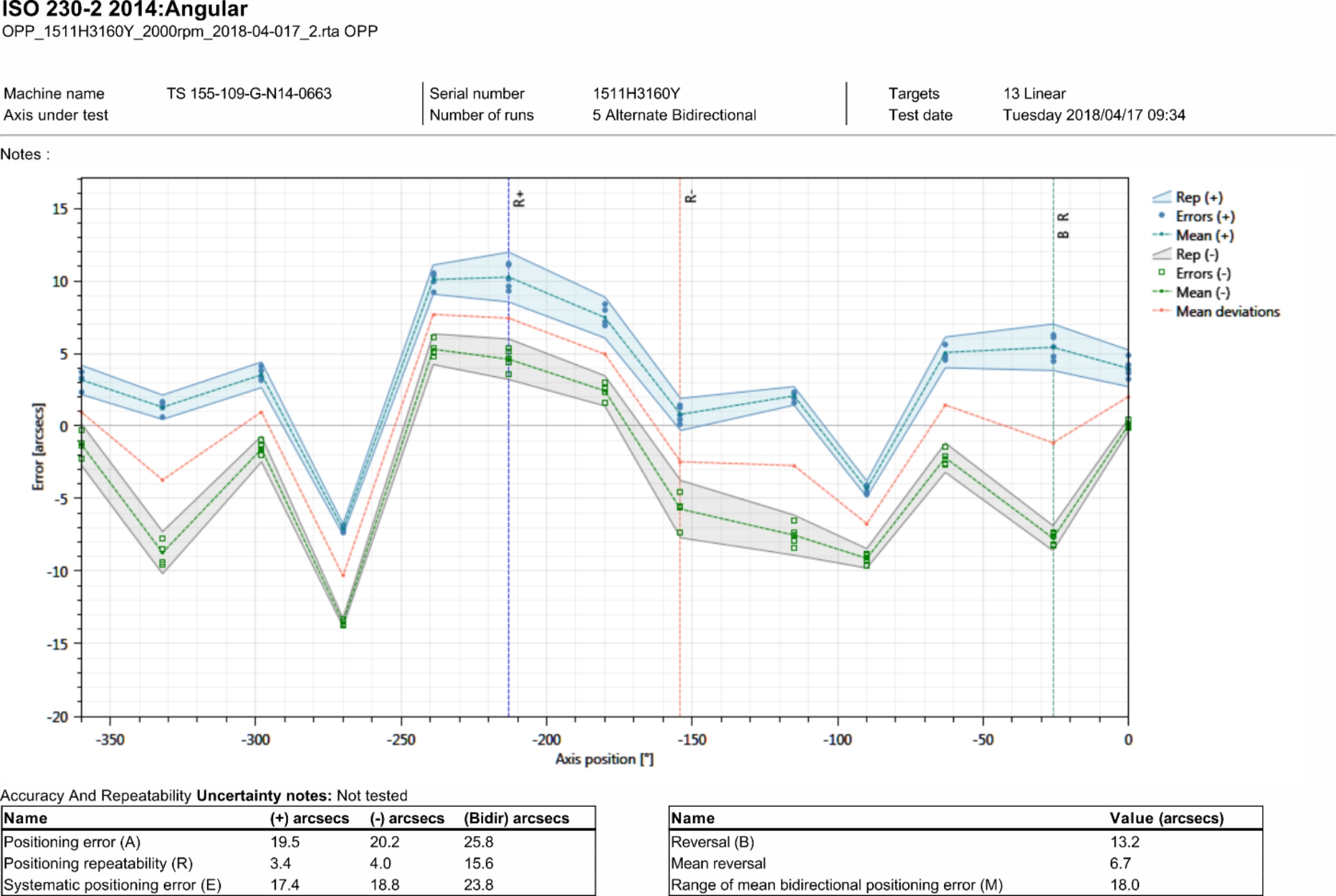
The G series in comparison with the older TwinSpin® series gives better results in positioning repeatability. On the picture below is a measurement made with a laser interferometer on size TS 155G with a ratio of 109, measured at maximum speed 2 000 rpm. In this case, evaluation was done according to ISO 230-2 2014 standard.
Picture 6: Accuracy and repeatability measurement
If you consider technical information about our G series interesting and have more questions, feel free to contact our sales department at sales@spinea.com. Our experts will be glad to provide you with further details necessary to design your perfect precision applications.





































